|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
This is used to store collision margin information. More...
#include <tesseract_common/macros.h>#include <boost/serialization/access.hpp>#include <Eigen/Core>#include <string>#include <unordered_map>#include <tesseract_common/types.h>#include <tesseract_common/utils.h>#include <boost/serialization/export.hpp>#include <boost/serialization/tracking.hpp>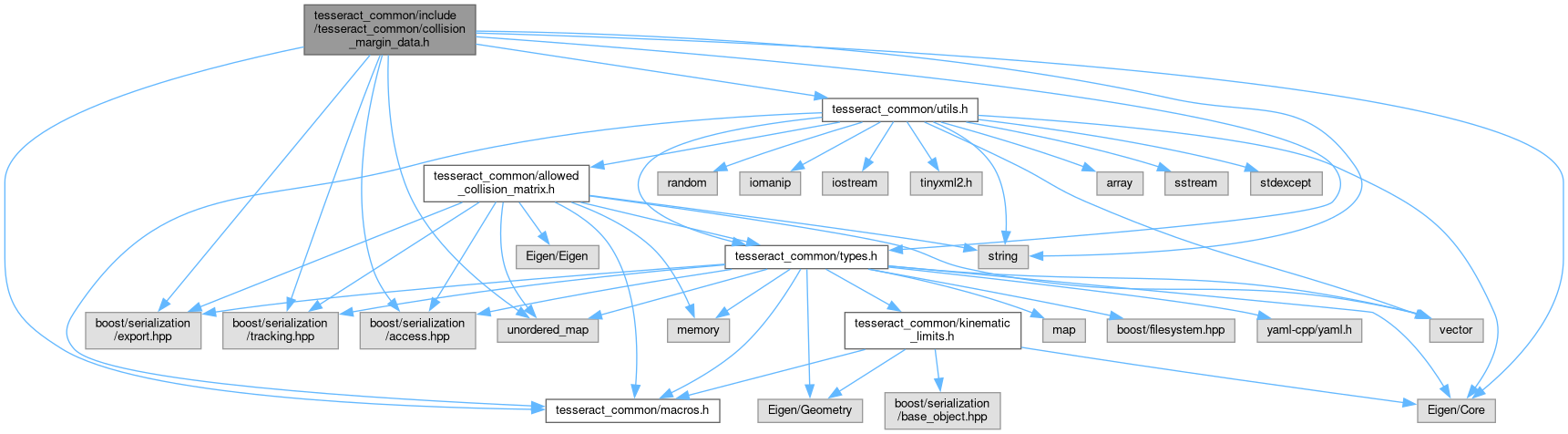

Go to the source code of this file.
Classes | |
| class | tesseract_common::CollisionMarginData |
| Stores information about how the margins allowed between collision objects. More... | |
Namespaces | |
| namespace | tesseract_common |
Typedefs | |
| using | tesseract_common::PairsCollisionMarginData = std::unordered_map< tesseract_common::LinkNamesPair, double, tesseract_common::PairHash > |
Enumerations | |
| enum class | tesseract_common::CollisionMarginOverrideType { tesseract_common::NONE , tesseract_common::REPLACE , tesseract_common::MODIFY , tesseract_common::OVERRIDE_DEFAULT_MARGIN , tesseract_common::OVERRIDE_PAIR_MARGIN , tesseract_common::MODIFY_PAIR_MARGIN } |
| Identifies how the provided contact margin data should be applied. More... | |
This is used to store collision margin information.
It should be used to perform continuous contact checking.