|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
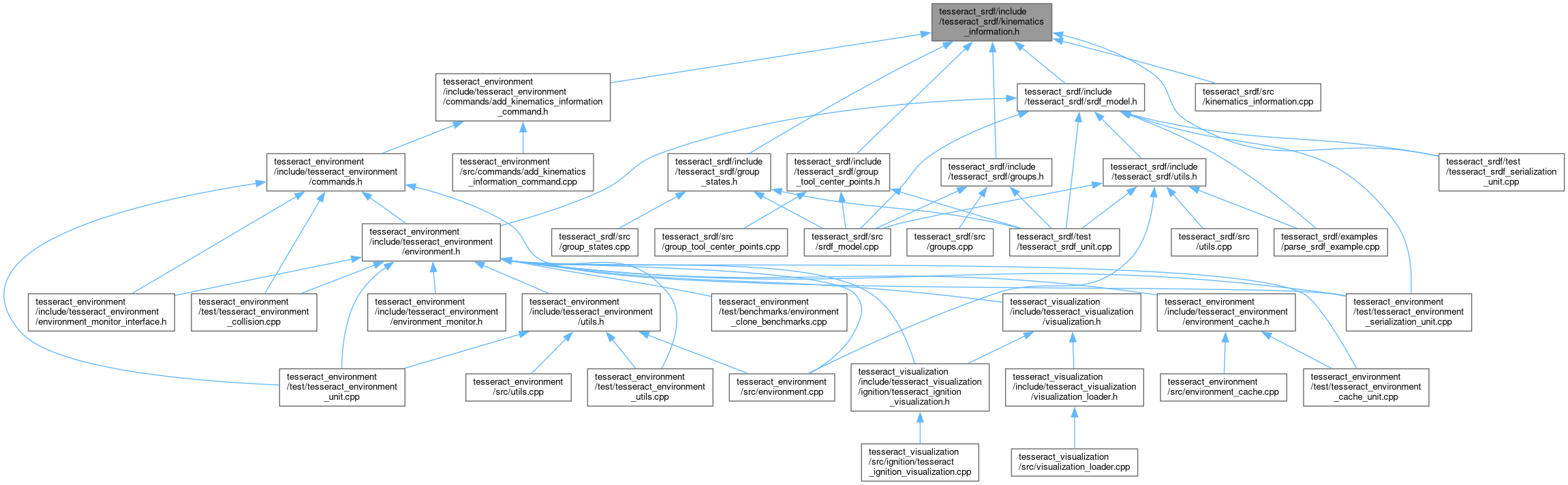
This hold the kinematics information. More...
#include <tesseract_common/macros.h>#include <boost/serialization/access.hpp>#include <unordered_map>#include <string>#include <vector>#include <array>#include <map>#include <Eigen/Geometry>#include <tesseract_common/types.h>#include <tesseract_common/utils.h>#include <boost/serialization/export.hpp>#include <boost/serialization/tracking.hpp>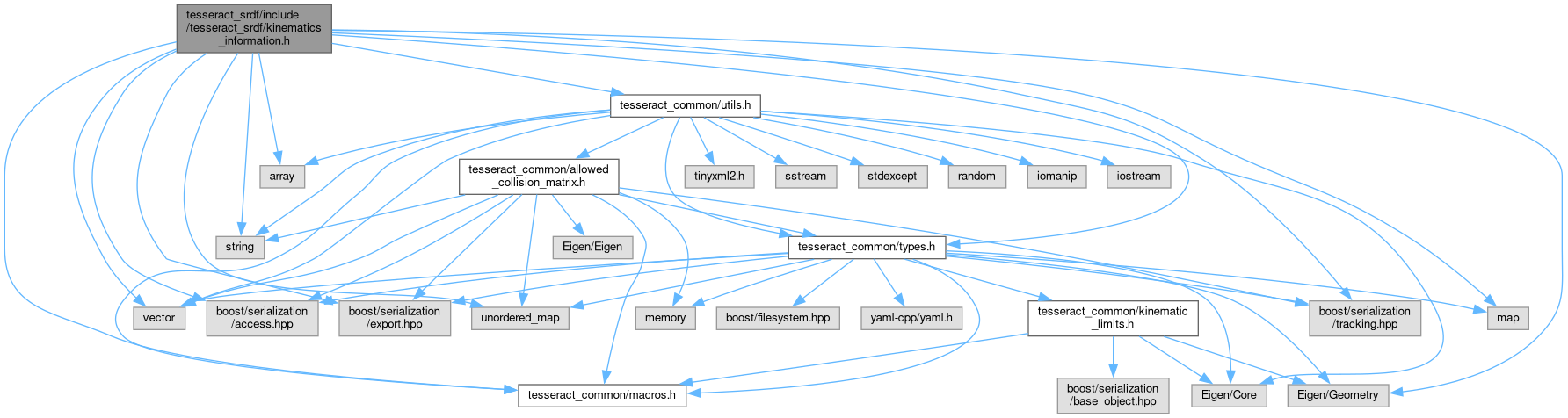
Go to the source code of this file.
Classes | |
| struct | tesseract_srdf::KinematicsInformation |
| This hold the kinematics information used to create the SRDF and is the data container for the manipulator manager. More... | |
Namespaces | |
| namespace | tesseract_srdf |
| Main namespace. | |
Typedefs | |
| using | tesseract_srdf::GroupsJointState = std::unordered_map< std::string, double > |
| using | tesseract_srdf::GroupsJointStates = std::unordered_map< std::string, GroupsJointState > |
| using | tesseract_srdf::GroupJointStates = std::unordered_map< std::string, GroupsJointStates > |
| using | tesseract_srdf::GroupsTCPs = tesseract_common::AlignedMap< std::string, Eigen::Isometry3d > |
| using | tesseract_srdf::GroupTCPs = tesseract_common::AlignedMap< std::string, GroupsTCPs > |
| using | tesseract_srdf::ChainGroup = std::vector< std::pair< std::string, std::string > > |
| using | tesseract_srdf::ChainGroups = std::unordered_map< std::string, ChainGroup > |
| using | tesseract_srdf::JointGroup = std::vector< std::string > |
| using | tesseract_srdf::JointGroups = std::unordered_map< std::string, JointGroup > |
| using | tesseract_srdf::LinkGroup = std::vector< std::string > |
| using | tesseract_srdf::LinkGroups = std::unordered_map< std::string, LinkGroup > |
| using | tesseract_srdf::GroupNames = std::set< std::string > |
This hold the kinematics information.