|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
#include <tesseract_common/macros.h>#include <gtest/gtest.h>#include <fstream>#include "kinematics_test_utils.h"#include <tesseract_kinematics/ur/ur_inv_kin.h>#include <tesseract_kinematics/kdl/kdl_fwd_kin_chain.h>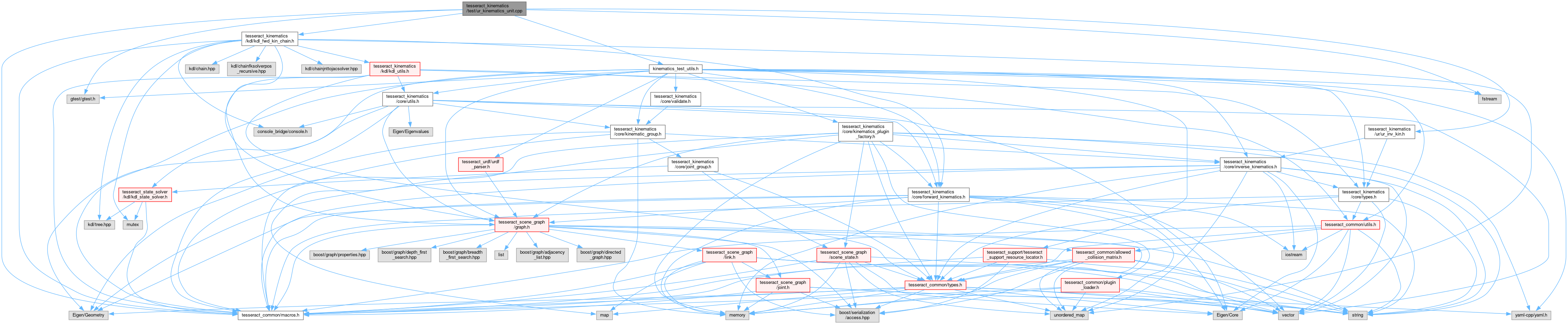
Functions | |
| void | runURKinematicsTests (const URParameters ¶ms, double shoulder_offset, double elbow_offset, const Eigen::Isometry3d &pose) |
| pose | setIdentity () |
| pose | translation ()[0]=0.75 |
| runURKinematicsTests (UR10Parameters, shoulder_offset, elbow_offset, pose) | |
| runURKinematicsTests (UR5Parameters, shoulder_offset, elbow_offset, pose) | |
| runURKinematicsTests (UR3Parameters, shoulder_offset, elbow_offset, pose) | |
| runURKinematicsTests (UR10eParameters, shoulder_offset, elbow_offset, pose) | |
| runURKinematicsTests (UR5eParameters, shoulder_offset, elbow_offset, pose) | |
| runURKinematicsTests (UR3eParameters, shoulder_offset, elbow_offset, pose) | |
| int | main (int argc, char **argv) |
Variables | |
| double | shoulder_offset { 0.220941 } |
| double | elbow_offset { -0.1719 } |
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
| void runURKinematicsTests | ( | const URParameters & | params, |
| double | shoulder_offset, | ||
| double | elbow_offset, | ||
| const Eigen::Isometry3d & | pose | ||
| ) |
| runURKinematicsTests | ( | UR10eParameters | , |
| shoulder_offset | , | ||
| elbow_offset | , | ||
| pose | |||
| ) |
| runURKinematicsTests | ( | UR10Parameters | , |
| shoulder_offset | , | ||
| elbow_offset | , | ||
| pose | |||
| ) |
| runURKinematicsTests | ( | UR3eParameters | , |
| shoulder_offset | , | ||
| elbow_offset | , | ||
| pose | |||
| ) |
| runURKinematicsTests | ( | UR3Parameters | , |
| shoulder_offset | , | ||
| elbow_offset | , | ||
| pose | |||
| ) |
| runURKinematicsTests | ( | UR5eParameters | , |
| shoulder_offset | , | ||
| elbow_offset | , | ||
| pose | |||
| ) |
| runURKinematicsTests | ( | UR5Parameters | , |
| shoulder_offset | , | ||
| elbow_offset | , | ||
| pose | |||
| ) |
| pose setIdentity | ( | ) |
|
pure virtual |
| double elbow_offset { -0.1719 } |
| double shoulder_offset { 0.220941 } |