|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
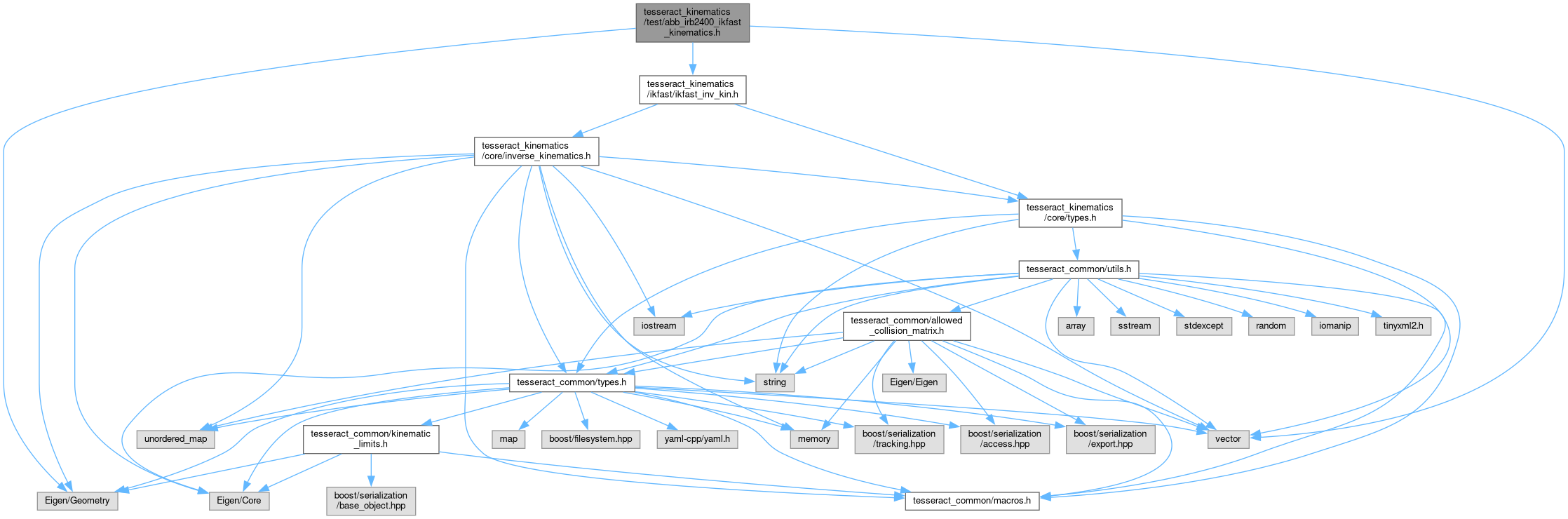
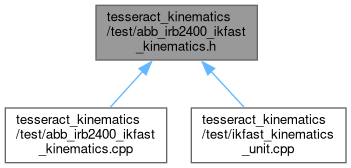
Go to the source code of this file.
Classes | |
| class | tesseract_kinematics::AbbIRB2400Kinematics |
Namespaces | |
| namespace | tesseract_kinematics |