|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
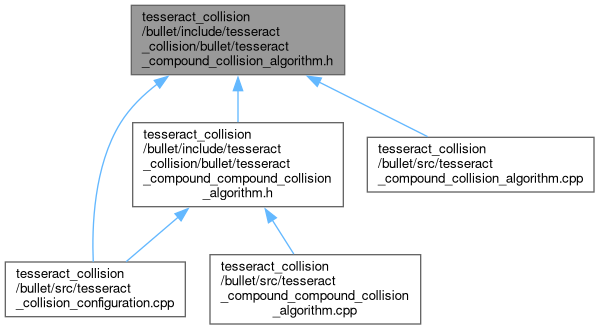
#include <tesseract_common/macros.h>#include <BulletCollision/BroadphaseCollision/btDispatcher.h>#include <BulletCollision/BroadphaseCollision/btBroadphaseInterface.h>#include <BulletCollision/CollisionDispatch/btActivatingCollisionAlgorithm.h>#include <BulletCollision/NarrowPhaseCollision/btPersistentManifold.h>#include <BulletCollision/BroadphaseCollision/btBroadphaseProxy.h>#include <BulletCollision/CollisionDispatch/btCollisionCreateFunc.h>#include <LinearMath/btAlignedObjectArray.h>#include <BulletCollision/BroadphaseCollision/btDbvt.h>
Go to the source code of this file.
Classes | |
| class | tesseract_collision::tesseract_collision_bullet::TesseractCompoundCollisionAlgorithm |
| Supports collision between CompoundCollisionShapes and other collision shapes. More... | |
| struct | tesseract_collision::tesseract_collision_bullet::TesseractCompoundCollisionAlgorithm::CreateFunc |
| struct | tesseract_collision::tesseract_collision_bullet::TesseractCompoundCollisionAlgorithm::SwappedCreateFunc |
Namespaces | |
| namespace | tesseract_collision |
| namespace | tesseract_collision::tesseract_collision_bullet |