|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
Parse PCL point cloud to octree from xml string. More...
#include <tesseract_common/macros.h>#include <stdexcept>#include <console_bridge/console.h>#include <pcl/io/pcd_io.h>#include <tesseract_common/utils.h>#include <tinyxml2.h>#include <tesseract_urdf/point_cloud.h>#include <tesseract_common/resource_locator.h>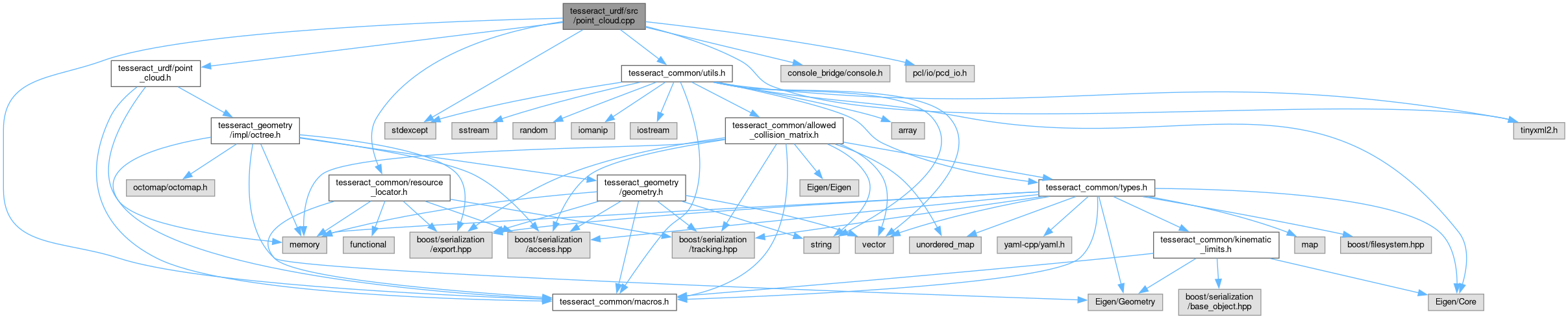
Parse PCL point cloud to octree from xml string.