|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
Tesseract Collision Utils. More...
#include <tesseract_collision/core/utils.h>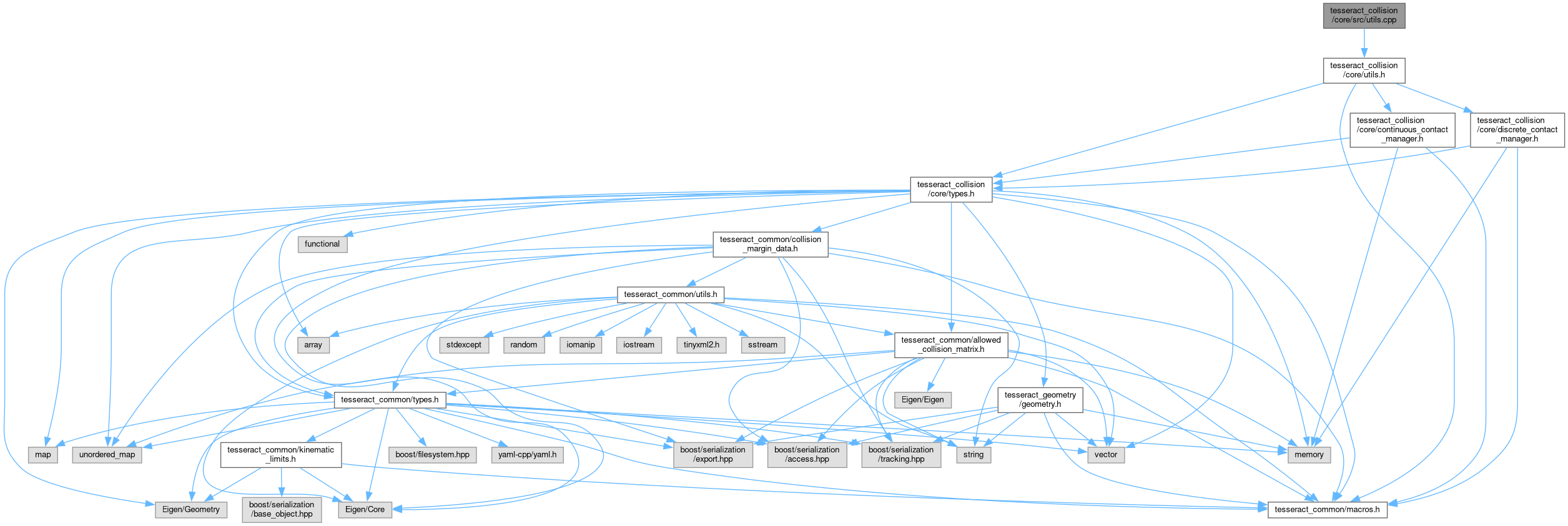
Namespaces | |
| namespace | tesseract_collision |
Functions | |
| IsContactAllowedFn | tesseract_collision::combineContactAllowedFn (const IsContactAllowedFn &original, const IsContactAllowedFn &override, ACMOverrideType type=ACMOverrideType::OR) |
| Combines two IsContactAllowedFns using the override type. More... | |
Tesseract Collision Utils.